Kreuzungsmanagement - IMK Engineering – Ingenieurbüro für Mechatronik und Kybernetik Dr. Bruns
Hauptmenü:
Referenzen
Referenzen ⇒ Kreuzungsmanagement
Die Idee: Autonom fahrende Kraftfahrzeuge (mit „Drive-by-Wire“-Technologie) bilden im Bereich einer Kreuzung ein Ad-hoc-Kommunikationsnetzwerk und berechnen im Verbund kollisionsfreie und optimale Trajektorien (bzgl. Durchfahrtsdauer, Komfort und Kraftstoffverbrauch) für die eigenständige Überquerung der Kreuzung. Befinden sich ausschließlich autonome Fahrzeuge im Kreuzungsbereich, so kann auf Lichtsignal- bzw. Ampelanlagen vollständig verzichtet werden, und der Durchsatz bzw. die Kapazität der Kreuzung lässt sich signifikant erhöhen, bis auf den 4-fachen Wert einer normalen Kreuzung mit Ampelanlage.
Das „Kreuzungsmanagement für Kraftfahrzeuge“ ist eine Idee, die am Lehrstuhl von Prof. Dr.-Ing. Joachim LÜCKEL in den 1990er Jahren entstanden ist. In dem Teilprojekt C1 (Vernetzung von autonomen mechatronischen Systemen zu selbstorganisierenden Gesamtsystemen) des Sonderforschungsbereichs „Massive Parallelität“ (SFB 376) wurde diese Idee kontinuierlich weiterentwickelt. Der SFB 376 wurde von der Deutschen Forschungsgemeinschaft (DFG) von 1995 bis 2006 gefördert. Die Arbeiten im Rahmen des „Kreuzungsmanagements“, wie sie im Folgenden dargestellt sind, dauerten noch bis Dezember 2008 an und bildeten den Gegenstand der Dissertation von Dr. Bruns [4].
„The best way to predict the future is to invent it.“ (Alan Kay, American Computer Scientist, 1971) | ||
| Ältere Varianten des Kreuzungsmanagements, wie sie in [1] und [4] beschrieben sind, setzten einen besonderen Fokus auf die detaillierte Abbildung des Verhaltens von Fahrzeug und Fahrer. Zu Fahrzeug- und Fahrermodellen sind unter der Rubrik Fahrdynamik-Regelung noch einige weitere Informationen vorhanden. | ||
Konzept und Kernelemente des Algorithmus
Viele praktische Probleme, die auf den ersten Blick völlig unterschiedlich erscheinen, erweisen sich oft als gleichartig, wenn man sie nur genügend abstrahiert bzw. auf eine Abstraktionsebene projiziert, die das jeweilige Problem auf seinen Kern oder eigentlichen Charakter reduziert und alles andere ausblendet (s. a. Systemtheorie). Die Formulierung eines praktischen Problems als sogenanntes Netzwerkflussproblem entspricht beispielsweise einer solchen Abstraktionsebene. Die unterschiedlichsten Problemstellungen können als Netzwerkflussprobleme formuliert werden, so bspw. auch die Routenplanung mit einem Navigationssystem.
Prinzipiell besteht ein Netzwerk aus „Knoten“ und „Kanten“. Objekte können dabei nur über Kanten von einem zum anderen Knoten gelangen bzw. „fließen“. Im Falle der Routenplanung entspricht das Netzwerk einem Wegenetz, dessen Knotenpunkte aus Städten und Ortschaften bestehen, die über Straßen miteinander verbunden sind. Die Straßen und Ortschaften werden in dem Netzwerk dann zu Knoten abstrahiert, die verbindenden Straßen zu Kanten. Die interessierende Fragestellung könnte in diesem Fall beispielsweise sein, wie ein Fahrzeug auf dem kürzesten Weg von der Stadt A zur Stadt B durch das Wegenetz „fließt“.
––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Abstraktion der Problemstellung
Das Problem der (autonomen) Überquerung einer Kreuzung bzw. eines beliebigen Verkehrsknotenpunktes (siehe Bild 1) kann ebenfalls als Netzwerkflussproblem dargestellt werden: Die Möglichkeiten eines Fahrzeugs zum Passieren eines Verkehrsknotenpunktes werden als Routen bezeichnet. Routen schneiden einander oder liegen quasi übereinander auf demselben Fahrstreifen. Ein in die Kreuzung einfahrendes Fahrzeug hat die 3 Routenmöglichkeiten, geradeaus zu fahren oder links bzw. rechts abzubiegen, wobei diese 3 Routen bis zum Kreuzungsinnenbereich auf demselben Fahrstreifen liegen. Für eine Kreuzung gemäß Bild 1 mit sowohl 4 Einfahrts- als auch 4 Ausfahrtsfahrstreifen ergeben sich dann insgesamt 12 Routenmöglichkeiten.
Jede Route lässt sich als eine Folge von diskreten Orten oder Positionen auf der Kreuzungsebene darstellen, die nacheinander von Fahrzeugen auf dieser Route passiert werden und an denen sich zu jedem Zeitpunkt nur ein Fahrzeug aufhalten darf. Jeder Route kann somit eine Knotenmenge zugeordnet werden, bei der jeder Knoten einer diskreten Position zu einem diskreten Zeitpunkt entspricht. Durch die Schnittbeziehungen von Routen werden die Knotenmengen sämtlicher Routen zur Gesamtmenge aller Knoten eines Netzwerks verknüpft. Durch dieses Netzwerk ist für jedes Fahrzeug ein Weg zu planen. Die Fahrzeuge entsprechen dabei den durch das Netzwerk fließenden Objekten, deren Fluss unter gewissen Nebenbedingungen zu optimieren ist.
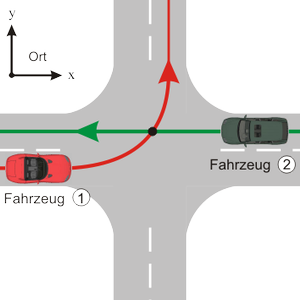
Bild 1: Die Ausgangssituation
Diskretisierung des Weges
Im ersten Schritt wird eine Diskretisierung des zurückzulegenden Weges $s$ auf einer Route durchgeführt. Dadurch erhält man eine Folge diskreter Positionen bzw. Wegstützstellen $s_h^*$ ($h=1,2,…$), wobei sich jede dieser Wegstützstellen exakt einem Ort in der Kreuzungsebene zuordnen lässt. Die Wegstützstelle $s_{h,f}^*$ entspricht dann der $h$-ten diskreten Position auf der Route $f$ ($f=1,2,…,12$) und kann exakt einem diskreten Ort zugeordnet werden, nämlich $p_{h,f}$($s_{h,f}^*$). Bild 2 zeigt das Ergebnis des beschriebenen Vorgehens für die Routen $a$ und $b$.
Diskretisierung der Zeit
Wenn sich ein Fahrzeug auf einer Route $f$ bewegt, so hängt es von seinem Geschwindigkeitsverlauf ab, wann bzw. zu welchen Zeitpunkten es die einzelnen Wegstützstellen $s_{h,f}^*$ seiner Route erreicht. Dieser Geschwindigkeitsverlauf wird auch als Trajektorie oder Geschwindigkeitsprofil bezeichnet und muss vor der Kreuzungsüberquerung berechnet werden bzw. bekannt sein. Da sich zu jedem Zeitpunkt nur ein Fahrzeug an einem beliebigen diskreten Ort $p_{h,f}$ aufhalten darf, wenn Kollisionen ausgeschlossen werden sollen, muss auch eine Diskretisierung der Dimension Zeit erfolgen. Das heißt, diskrete Wegstützstellen $s_{h,f}^*$ bzw. diskrete Orte $p_{h,f}$ müssen zu diskreten Zeitpunkten $t_i^*$ ($i=1,2,…$) eines gegebenen Zeithorizonts betrachtet werden. Dies kann durch Bild 3 dargestellt werden.
Die diskrete Wegstützstelle $s_{h,f}^*$ der Route $f$, betrachtet zum diskreten Zeitpunkt $t_i^*$, wird hiermit als Knoten $\alpha_{f,h,i}$ des zu bildenden Netzwerkes definiert. In Bild 3 sind weiterhin die Geschwindigkeitsprofile bzw. die Trajektorien der in Bild 1 dargestellten Fahrzeuge ① und ② zu sehen. Sie entsprechen den dickeren und mit Pfeilen versehenen Linien und zeigen an, zu welchen Zeitpunkten die einzelnen Wegstützstellen einer Route erreicht werden. Die Fahrzeugbewegungen, repräsentiert durch die entsprechenden Trajektorien, sind kontinuierlich ablaufende Vorgänge, die nun auf einer diskretisierten Darstellung des Kreuzungsbereichs abgebildet werden müssen. Dazu wird für jeden Knoten $\alpha$ ein Einzugsbereich $\Theta$ gebildet, dessen Grenzen jeweils durch den halben Abstand zu den unmittelbar benachbarten Knoten determiniert sind. Dadurch wird die gesamte Weg-Zeit-Ebene, auf der die kontinuierliche Bewegung der Fahrzeuge dargestellt wird, derart in Teilbereiche aufgeteilt, dass die Zuordnung von Teilbereichen und Knoten bijektiv ist.
Bild 2: Diskretisierung des Ortes
Bild 3: Diskretisierung von Ort und Zeit
Kollisonsvermeidung durch Knotensperrung
In Bild 4 sind die Einzugsbereiche für die Knoten einer Route sowie die Systematik der Abbildung einer möglichen Fahrzeugbewegung, repräsentiert durch ein Trajektoriensegment 1, dargestellt. Die Länge eines Fahrzeugs ist bekannt, und je nach gewähltem Geschwindigkeitsprofil kann dann exakt festgelegt werden, welche Knoten für andere Fahrzeuge gesperrt werden müssen, wenn die im Bild dargestellte Fahrzeugbewegung realisiert werden soll. Beim Übergang zum Zeitpunkt $t_i^*=4$, der bereits mit dem Erreichen der zugehörigen Einzugsbereiche erfolgt, befindet sich das Heck des Fahrzeugs an der Position $s_H$. Beim Übergang zum nächsten diskreten Zeitpunkt befindet sich die Fahrzeugfront an der Position $s_V$. Da für den diskreten Zeitpunkt $t_i^*=4$ dadurch die Einzugsbereiche der Knoten an den Wegstützstellen 15, 25 und 30 Meter durch die Fahrzeuggeometrie geschnitten werden, müssen diese Knoten für den Zugriff anderer Fahrzeuge gesperrt werden, sofern die Fahrzeugbewegung einerseits realisiert werden soll und andererseits Kollisionen mit anderen Verkehrsteilnehmern ausgeschlossen werden sollen.
Die in Bild 4 dargestellte Fahrzeugbewegung entspricht einem Abbremsvorgang, was daran zu erkennen ist, dass die Steigung des dargestellten Trajektoriensegments 1 zunimmt. Es wird also mehr Zeit benötigt, um einen bestimmten Weg zurückzulegen. Das gestrichelte Segment 2, das in dem Knoten mit den Koordinaten $t=6$ und $s=45$ endet, entspricht einer Fahrt mit konstanter Geschwindigkeit, während das gestrichelte Segment 3, das in dem Knoten mit den Koordinaten $t=3$ und $s=40$ endet, einer Bewegung entspricht, bei der das Fahrzeug beschleunigt wird. Es bestehen also prinzipiell sehr viele Möglichkeiten, wie ein Fahrzeug von einem gegebenen Startknoten zu einem anderen Knoten gelangen kann, wobei dieser Endknoten bzw. seine Koordinaten von dem jeweiligen Stelleingriff in das Fahrverhalten (Gas- bzw. Bremspedalstellung etc.) abhängen. Jede dieser Möglichkeiten entspricht einer potenziellen Kante im Netzwerk, und jede dieser Kanten wird mit einem Gütewert versehen, der von den Fahrerpräferenzen abhängt. Möchte ein Fahrer beispielsweise komfortorientiert (wenig Längs- und Querbeschleunigungen; möglichst konstante Geschwindigkeit) die Kreuzung passieren, so würde er das Segment 2 bzw. seine entsprechende Kante besser bewerten als die Kanten der Segmente 1 (Abbremsen/Verzögern) und 3 (Beschleunigen). Ein Fahrer, der die Kreuzung möglichst schnell passieren möchte, würde das Segment 3 besser bewerten als Segment 2 und Segment 2 besser als Segment 1. Durch die fahrerindividuelle Bestimmung der Kantengewichte lassen sich also unterschiedlichste Zielgrößen berücksichtigen und optimieren, wie etwa Komfort, Durchfahrtsdauer und Kraftstoffverbrauch.
Um den Verlauf von Trajektoriensegmenten in Abhängigkeit von Stell- bzw. Aktuatoreingriffen (Lenken, Beschleunigen, Bremsen etc.) zu berechnen, wird ein sogenanntes Fahrdynamikmodell verwendet. Dieses Modell erlaubt es, das dynamische Verhalten von Fahrzeugen in Computersimulationen realistisch nachzubilden. Beispielsweise wird in Bild 4 für den Zeitraum $Δt=10$ Sekunden eine feste Stellung von Gas- bzw. Bremspedal vorgegeben, und das Fahrdynamikmodell berechnet auf dieser Basis das durch die dicke blaue Linie dargestellte Trajektoriensegment. Das Fahrdynamikmodell legt auch fest, welche Trajektoriensegmente bzw. Kanten überhaupt realisierbar sind.
| In den ersten vier Varianten des Kreuzungsmanagements wurden ausschließlich Kreuzungen untersucht [4]. Bei der letzten Variante, welche die zu lösende Aufgabe als Netzwerkflussproblem modelliert, wurde erstmals ein Kreisverkehr analysiert und mit einer Kreuzung verglichen (Videos 2 und 3). | ||
Bild 4: Kollisionsvermeidung durch Knotensperrung
Die Trajektorienplanung für ein Fahrzeug, das die Kreuzung autonom überqueren will, läuft nun prinzipiell folgendermaßen ab: Zuerst wird das Fahrdynamikmodell gemäß dem realen Fahrzeug parametriert. Dann erfolgt die eigentliche Trajektorienplanung, die sich in mehrere aufeinanderfolgende Schritte gliedert. Das heißt, es wird nicht die gesamte Trajektorie in einem Schritt geplant, sondern es werden eine Vielzahl fahrdynamisch realisierbarer, aufeinanderfolgender Trajektoriensegmente berechnet, und ihre zugehörigen Kanten werden auf Basis der jeweiligen Fahrerpräferenzen mit einem Gütewert versehen. Ausgangspunkt ist der Beginn der Route. Von dort aus werden alternative Segmente berechnet, mit denen man einen Teil der Gesamtroute zurücklegt, jedoch abhängig vom zugehörigen Stelleingriff unterschiedliche Zeiten dafür benötigt und damit auch in unterschiedlichen Knoten des Netzwerks endet. Für sämtliche Knoten, die so erreicht wurden, wird nun das beschriebene Vorgehen wiederholt: Es werden für ein weiteres Teilstück der Route alternative Trajektoriensegmente berechnet und ihre zugehörigen Kanten bewertet. Dieses Vorgehen wird nun solange wiederholt, bis das Ende der Route bzw. das Ende des betrachteten Kreuzungsbereichs erreicht ist. Auf diese Weise entsteht ein baumartiger Digraph, dessen „Wurzel“ der Beginn der Route ist und dessen „Äste“ am Ende der Route enden, allerdings zu unterschiedlichen Zeitpunkten. Auf diesen Graph wird nun eine „Kürzeste-Wege“-Suche (s. a. Graphentheorie, Dynamische Programmierung) angewendet. Danach wird von dem „Astende“ mit der besten Bewertung der optimale Weg durch den Graph rückwärtsschreitend entwickelt. Er entspricht der optimalen Trajektorie, die man erhält, indem man die Trajektoriensegmente der Kanten des kürzesten Weges zusammensetzt.
Das beschriebene Verfahren ist echtzeitfähig. Das bedeutet, dass die Berechnung des Geschwindigkeitsprofils für ein Fahrzeug in einer vorgegebenen Zeit garantiert werden kann. Die Dauer der Berechnung kann durch die Vorgabe der Diskretisierung stark beeinflusst werden. Eine feinere Diskretisierung führt zu mehr Knoten und Kanten (siehe Bild 4) und erhöht dadurch den Berechnungsaufwand. Andererseits wird dadurch aber auch die Kapazität des Verkehrsknotenpunktes erhöht, da Fahrzeuge dichter hintereinander fahren können. Bei einer Vergröberung der Diskretisierung verhält sich dies genau umgekehrt. Die Berechnung eines Geschwindigkeitsprofils erfolgt in wenigen Millisekunden.
| [1] | Bruns, Torsten; Münch, Eckehard: Intersection Management as Self-Organisation of Mechatronic Systems. In: New Trends in Parallel & Distributed Computing, 6th Int. Heinz Nixdorf Symposium. Paderborn, 2006 | |
[2] | Bruns, Torsten; Trächtler, Ansgar: Autonomes Kreuzungsmanagement – Trajektorienplanung mittels Dynamischer Programmierung. In: 4. Fachtagung „Steuerung und Regelung von Fahrzeugen und Motoren – AUTOREG 2008“. Baden-Baden, 2008 | |
[3] | Bruns, Torsten; Trächtler, Ansgar: Kreuzungsmanagement: Trajektorienplanung mittels Dynamischer Programmierung. In: at – Automatisierungstechnik 57 (2009), S. 253–261, 2009 | |
[4] | Bruns, Torsten: Trajektorienplanung mittels Diskretisierung und kombinatorischer Optimierung am Beispiel des autonomen Kreuzungsmanagements für Kraftfahrzeuge. Dissertation, Universität Paderborn, 2011 | |
––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Erzielte Ergebnisse und Ausblick
Das vorgestellte Konzept wurde in der Echtzeit-Simulationssoftware iSim (Intersection Simulator, Version R2008b) implementiert. Mit dieser Software wurde das Konzept für die Verkehrsknotenpunkttypen Kreuzung (feste Geometrie; Videos 1 und 3) und Kreisverkehr (konfigurierbarerer Durchmesser; Videos 2 und 3) evaluiert.
Die Software iSim bietet eine Vielzahl weiterer Konfigurationsmöglichkeiten, bspw. für das Verkehrsaufkommen, dessen Zusammensetzung oder für die Diskretisierung der Dimensionen Zeit und Weg.
Während der Evaluierung wurden für jeden der Verkehrsknotenpunkttypen mehrere Simulationsläufe durchgeführt, wobei jeder Simulationslauf aus insgesamt 16 Einzelsimulationen besteht und das Verkehrsaufkommen schrittweise um 500 Fzg/Std von 500 in der 1. Simulation auf 8000 Fzg/Std in der 16. Simulation erhöht wurde. Bild 5 zeigt die Ergebnisse von jeweils 5 solchen Simulationsläufen, die sich in ihrer Konfiguration durch unterschiedliche Vorgaben für den Sicherheitsabstand sowie für die Anfangsgeschwindigkeit am Beginn des jeweiligen Verkehrsknotenpunktes unterscheiden.
––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Kapazität und Wartezeiten
Auf Bild 5 sind die Entwicklungen der Durchschnittsgeschwindigkeit der Fahrzeuge in Abhängigkeit des jeweiligen Verkehrsaufkommens sowie die Kapazitätsgrenzen der betrachteten Verkehrsknotenpunkte zu sehen. Bei dem Kreisverkehr liegt die Kapazitätsgrenze bei ca. 6200 Fzg/Std, bei der Kreuzung bei ca. 7200 Fzg/Std. Ein für die Simulation eingestelltes Verkehrsaufkommen von 8000 Fzg/Std bedeutet dann, dass sich innerhalb einer Stunde vor den 4 Einfahrten der Kreuzung ca. 800 Fahrzeuge stauen würden. Weiterhin kann man erkennen, dass die Durchschnittsgeschwindigkeit der Fahrzeuge bei einer Kreuzung signifikant höher ist. Wird der Verkehrsfluss bei einer Kreuzung gemäß Bild 1 bzw. Video 1 mit Lichtsignalanlagen geregelt und werden lediglich PKW berücksichtigt (keine LKW, keine Fußgänger etc.), so wird in der Literatur die maximale Kapazität mit ca. 1800 Fzg/Std angegeben. Bei Fahrzeugen mit autonomer Fahrfunktion kann somit die Kapazität auf ca. den 4-fachen Wert gesteigert werden, wobei Wartezeiten vor roten Ampeln komplett entfallen.
Leistungsfähigkeit und Flexibilität
Die wesentlichen Stärken des vorgestellten Verfahrens sind seine Leistungsfähigkeit und Flexibilität. Die auf systematischer Diskretisierung basierende Trajektorienplanung ist echtzeitfähig bzw. garantiert das Auffinden der optimalen Trajektorie in vorgegebener Zeit. Die Flexibilität findet ihren Ausdruck darin, dass das Verfahren prinzipiell auf beliebige Verkehrsknotenpunkte angewendet werden kann, unabhängig von den Verläufen und der Anzahl der Fahrspuren. Auch können die unterschiedlichsten Fahrzeugtypen, unabhängig von ihren geometrischen Abmessungen oder von ihren fahrdynamischen Eigenschaften, berücksichtigt werden. Theoretisch könnten sogar Fahrspuren des Gegenverkehrs für eine weitere Durchsatzerhöhung genutzt werden. Weiterhin können über die Art der Bewertung der Kanten bzw. der Trajektoriensegmente beliebige Zielgrößen wie beispielsweise Gesamtdurchsatz, Durchfahrtszeit, Komfort oder Energieverbrauch in die Optimierung eingebunden werden.
Bild 5: Kapazitätsvergleich von Kreuzung und Kreisverkehr
Der Weg zur Realisierung
Die technischen Voraussetzungen für eine Realisierung der autonomen Kreuzungsüberquerung sind prinzipiell vorhanden, tragfähige Konzepte für eine sukzessive Einführung liegen vor.
| Haben wir Ihr Interesse geweckt? Nehmen Sie gerne Kontakt zu uns auf! |
| Das folgende Video 3 zeigt eine parallele Simulation von Kreuzung und Kreisverkehr mit identischem Verkehrsaufkommen. Die Warteschlangenlänge vor den Knotenpunkten ist nicht sichtbar; sie wächst beim Kreisverkehr jedoch schneller und auch auf ein höheres Niveau. | ||
Die Software „Intersection Simulator“ (iSim R2008b)
Die Simulator-Software besteht aus den 2 Komponententypen „Administrator“ und „Simulator“. Je Simulation ist ein Administrator aktiv, der mit seiner Benutzerschnittstelle (GUI) primär für die Konfiguration und die Analyse der Simulation sowie für die Erzeugung des Verkehrsaufkommens verwendet wird. Der Administrator kann sich via TCP/IP mit bis zu 4 Simulator-Instanzen verbinden. Vor dem Start der Simulation werden die Simulator-Instanzen über den Administrator konfiguriert, indem festgelegt wird, ob der Simulator eine Kreuzung oder einen Kreisverkehr simulieren soll. Während der Simulation meldet der Administrator per Zufallsgenerator erzeugte Fahrzeuge, inkl. Fahrdynamik-Restriktionen und Wunschfahrprofilen, an die Simulator-Instanzen. Die Simulator-Instanzen berechnen dann gemäß der oben beschriebenen Systematik in Echtzeit die optimalen Trajektorien und stellen die Vorgänge im Bereich des jeweils simulierten Verkehrsknotenpunktes in einer 3D-Animation dar. Das Video 3 zeigt bspw. eine Simulation mit insgesamt 2 Simulatoren, Simulator 1 (links) für die Kreuzung und Simulator 2 (rechts) für einen Kreisverkehr (Durchmesser 10 m).
Im Folgenden werden die Möglichkeiten für Konfiguration und Analyse der Simulation(en) mittels des Administrators dargestellt und erläutert:

Bild 6: Kommunikationsstruktur der Simulator-Software iSim
Registerkarte „Environment“
Im Feld „IP address“ ist die IP-Adresse des Rechners einzugeben, auf dem die jeweilige Simulation erfolgen soll. Auf diesem Rechner muss zuvor eine Instanz von Simulator.exe gestartet worden sein. Falls die Simulation auf demselben Rechner ausgeführt werden soll, auf dem auch der Administrator läuft, so muss die IP-Adresse 127.0.0.1 (localhost) gewählt werden.
Der Port für die Kommunikation via TCP/IP, welcher der jeweiligen Simulation zugeordnet ist, muss dem Port entsprechen, auf dem die zugehörige Simulator-Instanz „eingerastet“ ist bzw. horcht. Die Port-Nummer wird in der Konsole der jeweiligen Simulator-Instanz ausgegeben.
Im Feld „Mode“ kann ausgewählt werden, ob der zu simulierende Verkehrsknotenpunkt eine Kreuzung (Intersection) oder ein Kreisverkehr (Roundabout) sein soll. Im Falle eines Kreisverkehrs kann weiterhin dessen Radius vorgegeben werden.
Unter „Vehicle graphics“ kann die Komplexität der 3D-Fahrzeugmodelle für die Animation eingestellt werden. Es gibt die Optionen LQ (Low Quality), MQ (Medium Quality) und HQ (High Quality). Bei der Wahl der letzten Option sollten die Simulationsrechner über eine leistungsstarke Graphikkarte verfügen, damit die Animation nicht zu sehr ruckelt.
Registerkarte „Simulation/Analysis“
Diese Registerkarte fasst die Ergebnisse der Simulationen zusammen, nachdem diese mit „Start“ gestartet wurden. Voraussetzung dafür ist, dass zuvor TCP/IP-Verbindungen zu den Simulationsrechnern hergestellt worden sind. Die Spalten der Datenmatrix im Bereich „Statistical data“ haben die folgende Bedeutung:
- Cars/h: Durchschnittliche Anzahl von Fahrzeugen, die pro Stunde den jeweiligen Verkehrsknotenpunkt überqueren.
- Cars overall: Fahrzeuge insgesamt, die während der Simulation den Verkehrsknotenpunkt überquert haben.
- Cars last min: Fahrzeuge insgesamt, die während der letzten Minute in der Simulation den Verkehrsknotenpunkt überquert haben.
- Cars in sim: Fahrzeuge insgesamt, die sich zum aktuellen Zeitpunkt in der Simulation befinden.
- DP failed: Anzahl der fehlgeschlagenen Optimierungen. Die Dynamische Programmierung (DP) konnte keine zulässige Trajektorie berechnen, und ein erneuter Optimierungslauf muss für das jeweilige Fahrzeug stattfinden. Dies kommt im Bereich der Kapazitätsgrenze vor. Die Fahrzeuge werden dann in einer Warteschlange verwaltet („Buffer load“).
- v_avg [m/s]: Durchschnittliche Geschwindigkeit über alle Fahrzeuge, die bisher in der Simulation den Verkehrsknotenpunkt passiert haben.
- dt_avg [s]: Durchschnittliche zeitliche Abweichung über alle Fahrzeuge der Durchfahrtsdauer gemäß optimalem, realisiertem Fahrprofil von der Durchfahrtsdauer gemäß Wunschfahrprofil.
- t_avg of DP [s]: Durchschnittliche Dauer einer Optimierung bzw. der Bestimmung eines optimalen, zulässigen Fahrprofils für ein Fahrzeug mittels der Dynamischen Programmierung.
Im Bereich „Buffer load / Congestion“ wird angezeigt, wie viele Fahrzeuge vor dem in der Animation sichtbaren Bereich des jeweiligen Verkehrsknotenpunktes warten. Der Inhalt der jeweiligen Warteschlange ist in Summe über alle 4 Einfahrten auf 100 Fahrzeuge beschränkt. Wächst der jeweilige Wert beständig an, so ist dies ein Zeichen dafür, dass die maximale Kapazität für den zugehörigen Verkehrsknotenpunkt und seine Konfiguration erreicht wurde.
Bild 7: Registerkarte „Environment“ der Simulator-Software iSim
Bild 8: Registerkarte „Simulation/Analysis“ der Simulator-Software iSim
Registerkarte „Traffic“
Im Feld „Traffic volume“ wird mit dem Schieberegler „Vehicles/h“ das Verkehrsaufkommen (Fahrzeuge je Stunde) eingestellt.
Prinzipiell werden die Fahrzeuge, die sich in einer Simulation befinden, nach ihren fahrdynamischen Fähigkeiten in 3 Kategorien eingeordnet, in schnell (Fast), mittelschnell (Medium) und langsam (Slow) fahrende Fahrzeuge. Charakteristisch für die jeweilige Klasse sind spezielle Bandbreiten für fahrdynamisch relevante Parameter, wie maximale Antriebskraft $F$, Fahrzeuggewicht $m$ und Widerstandsbeiwert $d$, der Widerstandsgrößen wie bspw. Luft- und Rollwiderstand zusammenfasst. Innerhalb dieser Bandbreiten werden für ein Fahrzeug die Ausprägungen dieser Parameter mittels eines Zufallsgenerators erzeugt. Die Anzahl der Fahrzeuge einer Kategorie wird mit den Schiebereglern im Feld „Vehicle distribution“ eingestellt. Der auch hier zugrundeliegende Zufallsgenerator ist im Beispiel von Bild 9 so konfiguriert, dass durchschnittlich 34 von 100 erzeugten Fahrzeuge in die Kategorie „Fast“ entfallen und jeweils 33 in die Kategorien „Medium“ und „Slow“.
Im Feld „Arrival configuration“ werden Parameter bzgl. Abstand zum vorausfahrenden Fahrzeug („Safety distance“) und Eintrittsgeschwindigkeit („Drive in speed“) für neu in den Verkehrsknotenpunkt einfahrende Fahrzeuge festgelegt. Um die in den Fahrschulen propagierte Faustformel „Halbe Tachoanzeige gleich Sicherheitsabstand in Metern“ für den Sicherheitsabstand zu realisieren, muss bei „Safety distance“ ein Wert von 1,8 eingegeben werden:
$v \left[km/h\right] \Rightarrow v \cdot 1000/3600 \left[m/s\right] \cdot 1,8 \left[s\right] = \frac{1}{2}v \left[m\right] \Rightarrow$ Abstand [m].
Der Faktor bei „Drive in speed“ gibt die Höchstgrenze für die Einfahrtsgeschwindigkeit an, gemessen an der Geschwindigkeit des vorausfahrenden Fahrzeugs. Fährt das vorausfahrende Fahrzeug 10 m/s schnell, so tritt ein folgendes Fahrzeug bei einem Faktor von 1,6 maximal mit einer Geschwindigkeit von 16 m/s in die Kreuzung oder den Kreisverkehr ein.
Im Feld „Preference velocity profile“ wird letztendlich der Zufallsgenerator für die Erzeugung der Wunschfahrprofile konfiguriert. „Fast“ steht für Fahrer, die möglichst schnell die Kreuzung passieren möchten, „Slow“ repräsentiert die komfortorientierten Fahrer, und „Medium“ liegt zwischen diesen beiden Fahrertypen. Die Voreinstellung gemäß Bild 9 bedeutet, dass sämtliche Fahrzeuge in der Simulation den Verkehrsknotenpunkt schnellstmöglich passieren wollen.
Bild 10: Registerkarte „Grid Configuration“ der Simulator-Software iSim
Bild 9: Registerkarte „Traffic“ der Simulator-Software iSim
Registerkarte „Grid configuration“
Die Optionen, die auf dieser Registerkarte zur Verfügung gestellt werden, sind nur für Anwender gedacht, die mit den Besonderheiten der zugrundeliegenden Algorithmen vertraut sind.
Im „Feld delta_t [s]“ (Bild 10) wird die zeitliche Diskretisierung vorgegeben. Das Feld „Max time [s]“ gibt das maximale Zeitfenster an, innerhalb dessen das Fahrzeug die Kreuzung passiert haben muss. Je kleiner das Zeitfenster ist, desto geringer der Rechenaufwand und desto kürzer die Laufzeit der Dynamischen Programmierung (DP). Mit kleiner werdendem Zeitfenster steigt jedoch die Anzahl der fehlgeschlagenen Optimierungen (siehe Bild 8, „DP failed“) ab einem gewissen Grenzwert.
Bei einem Kreisverkehr kann der Abstand der Stützstellen des Kollisionsrasters über den Administrator vorgegeben werden. Ein Kreisverkehr besteht prinzipiell aus 3 Segmentarten, aus Geraden („Straight“), auf der die Fahrzeuge in den Kreisverkehr hineinfahren oder auf der sie ihn verlassen, aus Außenkreissegmenten („Outer circle“, Radius $r_A$) und Innenkreissegmenten („Inner circle“, Radius $r_I$). Für diese drei Segmentarten kann, bisher nur im Falle des Kreisverkehrs, die örtliche Diskretisierung [m] („Discretization [m]“) vorgegeben werden.
Über die Felder „Additional sampling points“ und „Maximum distance [m]“ können Anzahl und Lage der Stützstellen des Optimierungsrasters beeinflusst werden. Diese Stützstellen entsprechen prinzipiell den Entscheidungsstufen der Dynamischen Programmierung. Zusätzliche Stützstellen erhöhen den Optimierungsaufwand. In dem ersten Feld kann ein Richtwert für den Stützstellenabstand [m] auf den Geradenstücken (Außenbereich) vorgegeben werden, im zweiten Feld entsprechend für den Innenbereich der Kreuzung oder des Kreisverkehrs. Beim Kreisverkehr besteht der Innenbereich aus Segmenten von Innenkreis und Außenkreis(en).
Das Feld „Enable heuristics“ ermöglicht die Nutzung von Heuristiken zur Laufzeitoptimierung der Dynamischen Programmierung. Die eingesetzten heuristischen Verfahren befinden sich noch in der Entwicklung und werden aktuell noch modifiziert und verbessert.